CoppeliaSim場景 <<
Previous Next >> 逆向運動學函式
suction pad 吸盤
加入吸盤後,鍵盤控制作動:
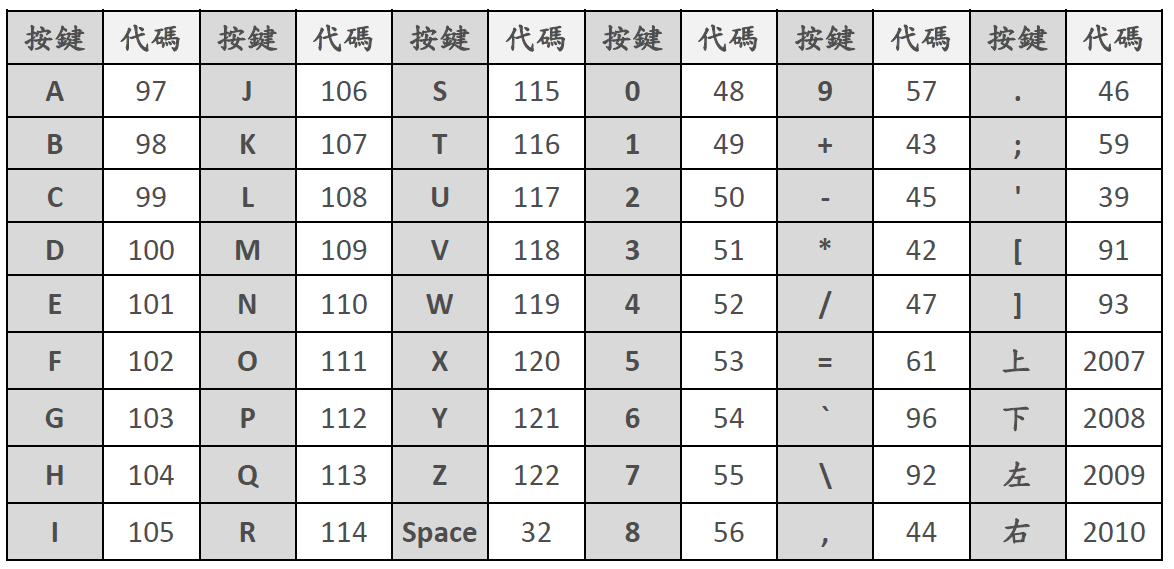
參考鍵碼:
keyboard.lua內容:
function sysCall_init()
joint1=sim.getObjectHandle('joint1')
joint2=sim.getObjectHandle('joint2')
joint3=sim.getObjectHandle('joint3')
jointz=sim.getObjectHandle('jointZ')
sim.setJointTargetPosition(joint1,0)
sim.setJointTargetPosition(joint2,0)
sim.setJointTargetPosition(joint3,0)
sim.setJointTargetPosition(jointz,0)
deg1=0
deg2=0
deg3=0
end
function sysCall_actuation()
message,auxiliaryData=sim.getSimulatorMessage()
while message~=-1 do
if (message==sim.message_keypress) then
if (auxiliaryData[1]==100) then
deg1=deg1+1
deg3=deg2-deg1
sim.setJointTargetPosition(joint1,deg1*math.pi/180)
end
if (auxiliaryData[1]==97) then
deg1=deg1-1
deg3=deg2-deg1
sim.setJointTargetPosition(joint1,deg1*math.pi/180)
end
if (auxiliaryData[1]==119) then
deg2=deg2+1
deg3=deg1-deg2
sim.setJointTargetPosition(joint2,deg2*math.pi/180)
end
if (auxiliaryData[1]==115) then
deg2=deg2-1
deg3=deg1-deg2
sim.setJointTargetPosition(joint2,deg2*math.pi/180)
end
if (auxiliaryData[1]==2008) then
sim.setJointTargetPosition(jointz,-0.018)
sim.setIntegerSignal("pad_switch",1)
end
if(auxiliaryData[1]==2007) then
sim.setJointTargetPosition(jointz,0)
end
if(auxiliaryData[1]==32) then
sim.setIntegerSignal("pad_switch",0)
end
sim.setJointTargetPosition(joint3,deg3*math.pi/180)
end
message,auxiliaryData=sim.getSimulatorMessage()
end
end
CoppeliaSim場景 <<
Previous Next >> 逆向運動學函式